 信息时间:2024-02-19
信息时间:2024-02-19  信息来源:中国工控网
信息来源:中国工控网
有的人在调试维护ABB机器人时,会遇到四六关机轴超出耦合工作范围的情况,如下图所示
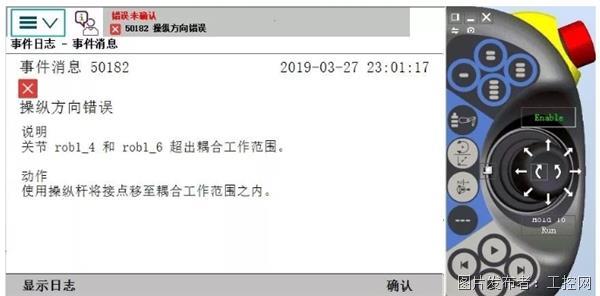
什么是耦合工作范围: 若4轴旋转300度,6轴也旋转300度,相当于末端旋转了600度。这样对于挂在机器人身上的管线包可能损坏。所以为了防止线管的损坏,我们可以设定机器人4轴和6轴的总的旋转度数,这个就是耦合工作范围。
ABB机器人对于ID型机器人(比如6640ID,6轴中空),4轴和6轴除了各自有上下限位以外,还有一个耦合限位。其它型号的机器人正常都是没有耦合限位的,但是我们可以进行设定。
设定的方法如下:
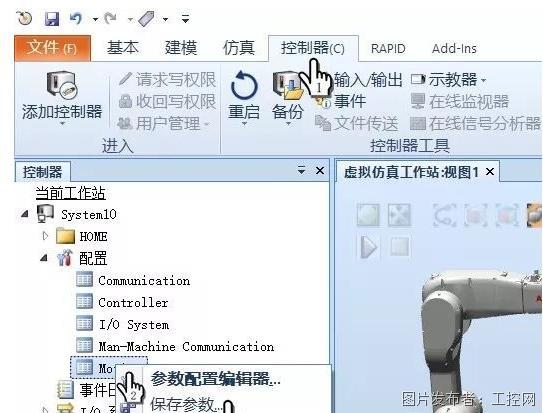
1进入【控制器】选项卡——2展开【配置】,右击【Motion】参数——3单击【保存参数】命令。
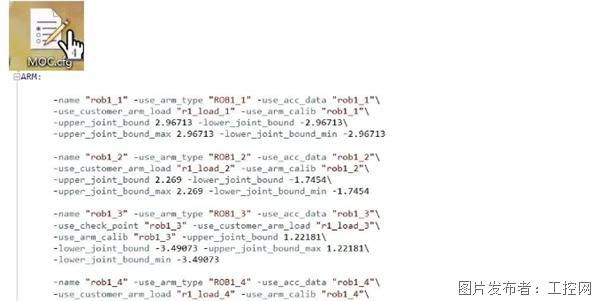
4找到保存的“MOC.cfg”文件并打开——5找到ARM列表,并在rob_4轴后加入“-upper_coupled_joint_bound_2 4.71246\-lower_coupled_joint_bound_2 -4.71246”保存【注:4.71246为设定的耦合工作范围值,单位为rad,1rad约等于57.3度,具体根据需要设定值】
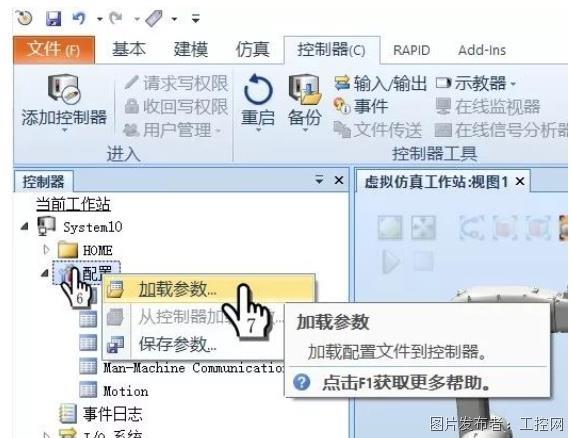
6再回到工作站【控制器】选项卡,右击【配置】命令——7单击加载参数,加载刚修改的“MOC.cfg”文件,重启即生效。
联系地址:陕西省西安市咸宁西路28号西安交通大学电信学院综合自动所内 联系电话:029-82664629 029-82668775 陕ICP备08001950号-1
版权所有:陕西自动化学会 Copyright © 2006 - 2015 www.sxpaa.com All Rights Reserved 技术支持:陕西博通网络

