
 信息时间:2023-02-01
信息时间:2023-02-01  信息来源:中国自动化学会
信息来源:中国自动化学会
中国科学院院士、华中科技大学校学术委员会主任、国家数字化设计与制造创新中心主任丁汉出席2022中国自动化大会,并作题为“机器人化智能制造”的报告。丁汉院士在报告中阐述了机器人化智能制造的研究进展并对未来发展趋势进行了展望。智能制造是制造业深入实施创新驱动发展战略的重要引擎,是我国由“制造大国”到“制造强国”跨越的必由之路。机器人化智能制造旨在利用机器人柔顺性、灵活性、开放性、易于重构、可并行协同作业等优势,将人类智慧和知识经验融入感知、决策、执行等制造活动中,并赋予机器人化制造装备在线学习与知识进化能力,并通过人与机器合作共事,扩大、延伸和部分地取代人类专家在制造过程中的脑力劳动,提高制造装备和系统的适应性与自治性。机器人化智能制造是智能制造的前沿发展方向,已成为制造学科前沿研究热点,并有望带来产业变革,最终将通过无处不在的机器人,无处不在的传感,无处不在的智能,实现无处不在的制造。
智能制造在制造业扮演着重要的角色,我国把大力发展制造业摆在更加突出的位置,连续十年中国制造业的规模是世界第一,并且品种、种类数量也是全球第一。制造业在国民经济中占比1/3,但未来如何从制造大国变成制造强国,这是值得我们思考的。
01智能制造未来发展战略思考
制造业支撑起了我国重大技术和装备生产,包括高铁、919飞机、歼20等大型装备,在我们国家的重大工程和行业中发挥着重大作用。但在国家航天、航空、航海战略行业中,一些高端装备和关键制造技术还依赖于外国进口。
我国的制造技术产业经历三个发展阶段,如图1所示。“十二五”规划强调高精度数字化制造;十三五”规划强调数字化智能化制造;“十四五”规划强调高性能智能化制造。其发展趋势是从高精度到高性能、数字化向智能化迈进。未来通过信息技术的深度融合,无处不在的制造、智能与传感将在制造业涌现。

图1 先进制造的发展阶段
智能制造的发展主要有以下五点趋势。第一个趋势,机器人与机械材料、数学力学、信息传感、生物医学等多学科强烈共振,形成具备与作业环境、人和其它机器人自然交互的新一代“共融机器人”,如图2所示。

图2 共融机器人
第二个趋势,智能制造技术、机器人技术与信息技术不断深度融合,促使先进制造技术纷纷涌现,孕育着新的制造原理和概念,形成了创新源动力。其中比较有代表性有特种能场制造、精密与超精密制造技术,这些先进制造技术将成为智能制造技术的基础,如图3所示。智能制造技术当前正逐渐以大数据、云计算等互联网技术为基础,呈现出数字孪生、车间与工厂智能、人机相互合作为特征的发展趋势。

图3 新一代制造技术
第三个趋势,新一代信息技术与制造业深度融合,引发制造装备、系统与模式的重大变革,制造模式向人机共融、泛在制造,无人化制造等方向发展,如图4所示。共融机器人、人工智能大数据、人机交互技术等新━代信息技术与先进制造的深度融合,将突破智能制造系统的柔顺性和人机共融能力。通过泛在感知技术进行全场景、实时多模态融合感知和适合大型、复杂、多品种小批量的零件“即插即用”式泛在制造。未来,智能装备会朝着自决策、自进化、自律控制的趋势发展。

图4 制造技术与制造业融合
第四个趋势,人工智能推动制造系统进化,新一代人工智能技术与先进制造技术的融合,促使智能制造在自决策、自学习、自进化方面形成新的热点,如图5所示。智能服务为核心的产业变革和形态变革,是新一代智能制造的主题。新一代的云端服务和工业智联网也是新一代制造系统的重要支撑,制造智联的自决策优化将促进成车间与工厂的智能化升级。

图5 人工智能与智能制造
第五个趋势,机器人化智能制造成为智能制造的主攻方向,如图6所示。利用机器人灵巧、顺应和协同的特点,可以将人类的智慧和知识经验融入制造过程,实现非结构化环境下的制造。通过多机协作机制,实现人、机、环境共融。
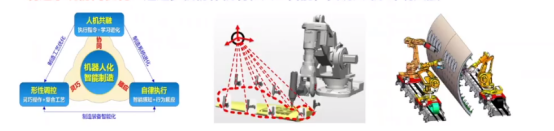
图6 机器人化智能制造
下图是我国智能制造的体系架构。从图中可以看出发展智能制造需要从人机、多机协同的机制、演变规律,以及运行原理着手,同时在关键技术方面要形成突破,形成一些重点优先的发展领域,从而支撑国家的重大战略需求。
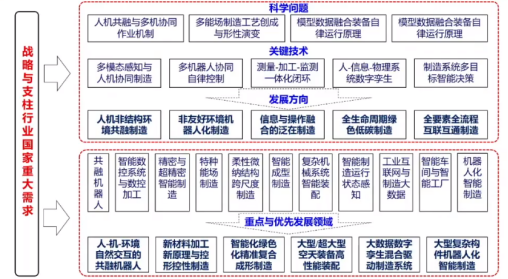
图7 我国智能制造的体系架构
智能制造体系架构主要有五大发展方向。发展方向之一,非结构环境下人、机、环境共融制造,如图8所示。在非结构化环境下,制造状态多模态感知与人机协调控制激发全场景多模态感知与多元数据融合,人、机、环境将达到共融制造。当前的制造一般都是在结构化环境中进行,而制造讲究的是效率、成本、质量第一。所以,在未来的非结构化环境中,人工智能感知和人机协同控制融合发展将成为主流。
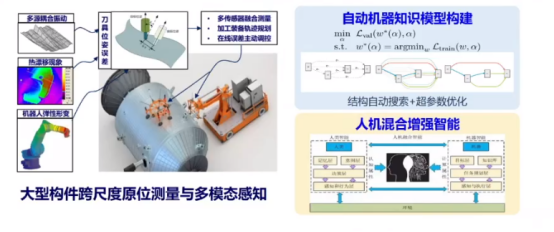
图8 人、机、环境共融制造
发展方向之二,极端作业环境下的机器人化智能制造,如图9所示。未来的极端环境,尤其是恶劣环境下的,人必须得到解放。机器人化智能制造将取代人在恶劣环境、高重复性的、人类无法适应的跨尺度条件下的工作。

图9 极端作业环境下的机器人
发展方向之三,泛在信息感知与操作融合的泛在制造。主要有三方面的内容:加工系统多模态信息感知与状态监测、加工动力学行为与性能调控机制、多机协同自律制造新原理与新模式,如图10所示。
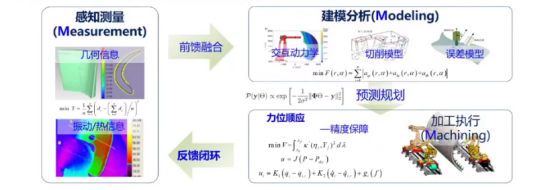
图10 泛在制造
发展方向之四,全生命周期绿色低碳制造。绿色制造是永恒的主题,节能、新材料、绿色加工工艺与节能管控,以及回收与再制造,这是今后智能制造发展的重要方向,如图11所示。

图11 绿色低碳制造
发展方向之五,全要素全流程互联互通制造,如图12所示。一方面互联互通转变制造模式,使得智能制造更加便捷。但随之而来产生了个人隐私保护的问题,如何既让用户享受互联互通的优势,又使其个人的隐私得到保护?如何做到主动的安全保护?能否建立一个主动的防御系统,使工业互联网能够实现互联互通,同时要又能保护个人的隐私和安全,这些是我们学术界需要进行研究的。

图12 互联互通制造
02机器人化智能制造研究探索
世界各国都对机器人化智能制造高度重视,如图13所示。美国的无尽前沿法案,对美国机器人的发展制定了一个路线图,他们重点关注机器人和先进制造技术。欧盟比较关注机器人的加工能力,明确提出了要实现50μm精度的加工机器人,而我们国家的战略是 “中国制造2025”,主要是实现人、机、环境的共融。

图13 各国布局机器人化智能制造领域
机器人化制造是智能制造领域国际热点。近年来,华科、清华、上交、浙大、天大以及航天科工、航天科技、中航工业等企业,通过机器人机械学与加工工艺、技术共融,在大型构件制造技术及装备方面取得了较好进展,如图14所示。最近,Science Robotics、MIT科技评论等聚焦“机器人集群、用于机器人的人工智能、灵巧机器人”等研究方向。Science Robotics期刊上提出了未来机器人面临的十大挑战,包含新材料、仿真、能源、机器人集群以及人工智能等等。MIT科技评论了机器人领域的十大突破技术,位于榜首的是灵巧机器人。实现灵巧机器人是未来面临的最大机器人技术难度,这是一个非常值得探索的学术研究方向。
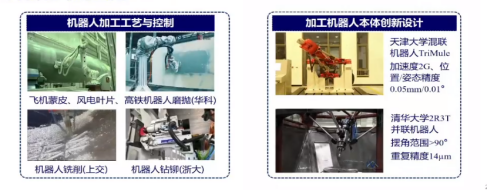
图14 中国机器人智能化发展
自1997年开展智能4M系统以来,华科大团队通过理论探索、技术攻关,攻克了大型复杂曲面加工精度保障难题,研制了机器人加工装备与数控加工自主工业软件,并在企业得到重要应用。2005年,我们参与了973计划,完成了机器人的数字化制造。2010年,转向了航空零件的数字化。2015年,在国内率先开展机器人加工的重点基金项目研究。2017年,牵头风电叶片打磨重点研发国家专项。2021年,获批了机械学科的第一个基础科学中心—机器人化智能制造。
机器人化智能制造的科学内涵就是使得单个的机器能够实现能工巧匠,多个机器能够实现多机协作,人机可以实现自然交互。所以,机器人化智能制造基础科学中心目标是建立起中国的机器人化智能制造理论体系,同时形成机器人加工30μm的技术,研制机器人化智能制造重大装备三大预期目标。另外,我们也提出了实现机器人化加工的形性调控、行为顺应和系统进化三大科学问题。希望机器人化智能制造基础科学中心,能够站在国际技术的前沿引领国际机器人化智能制造科学与技术发展。
机器人化智能制造基础科学中心的研究方向主要有三个,一是解决机器人化复杂曲面制造,二是机器人化大型构件制造,三是机器人化功能结构制造。大型复杂曲面具有尺寸超大、曲面复杂、形性严苛等特点,实现它的智能化制造不仅是我国的重大需求,同时是公认的国际难题。其中比较有代表性的是这种薄壁件的加工,在生产过程中变形问题,振动问题,加工效率问题,是制造业里面经久不衰的主题。
在我国很长一段时间里,大型构件的全型面加工,如大型航空器蒙皮、大型风洞、高铁结构体加工,普遍采用人工作业方式,作业环境恶劣、效率低、一致性差,且无法形成加工质量闭环控制,加工品质难保证,这些工作迫切需要尽快实现机器人化智能制造。
在实现机器人化智能制造中,有如下几个挑战。其一是机器人加工装备。现有数控加工装备和工业机器人难以兼顾大型复杂构件高效、高品质制造的需求。所以,如何设计出具备高灵活性、高精度、高刚度且适用于大型复杂结构件制造的加工机器人本体?实现“高速不抖”、“重载不趴”?以及如何通过手眼协调,柔顺控制技术实现高精度加工?这是亟需解决的问题,如图15所示。

图15 机器人加工
其二是全场景测量技术。大型复杂构件尺寸大、面型复杂、表面呈现弱结构纹理特征和非朗伯高光反射,传统测量手段难以满足跨尺度检测要求。如何攻克超大弱结构特征高光反射曲面测量系统校准、拼接等难题,实现全场景高精高效原位测量与质量评定? 如图16所示。

图16 全场景测量技术
其三是自律跟踪控制。由于构件尺寸大、缺乏定位基准,并行加工过程中多机轨迹干涉、加工振动耦合,对多机自主寻位与自律控制带来挑战。如何实现大范围工作空间内多移动加工机器人全场景快速准确的自主寻位与自律控制?如图17所示。

图17自律跟踪
其四是测量建模加工一体化技术。由于机器人几何误差和非几何误差同时影响输出精度,所以面临的技术挑战是如何实现复杂曲面零件轮廓误差测量、建模与补偿?如图18所示。
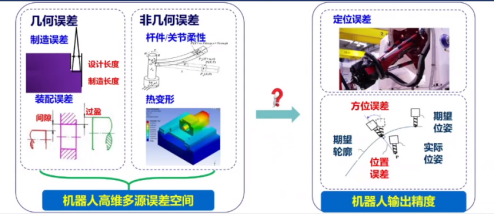
图18 测量建模加工一体化
我们建立了超大尺寸空间机器人移动加工误差顺应补偿机制与精度可控理论,实现了大型复杂构件多机器人协同原位制造,如图19所示。如:在100米的超大尺寸空间中,通过激光雷达等技术将移动机器人在运动空间的位置精度控制在±5mm。在机械臂2米范围的操作空间中,通过点云伺服等技术实现了±1mm精度。在40mm范围的交互空间中,通过终端力控,最终将精度控制到±50μm。机器人实现大型构件的微米级加工,需要经过运动空间、操作空间、交互空间反复的演进,最后才能达到可靠的加工精度。
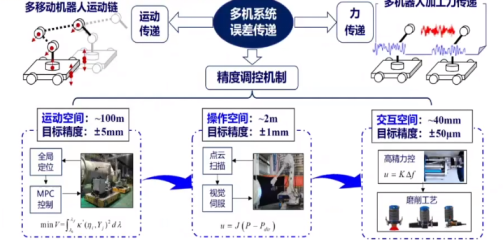
图19大型构件机器人加工
在视觉引导的机器人加工路径规划研究方面,我们发明了测量-加工机器人系统精确标定与刀具轨迹生成技术,解决了易变形构件机器人铣削路径规划难题,相关工作以及系列论文发表在IEEE T. Robotics上,如图21所示。

图20 机器人加工路径规划
在机器人测量、操作、加工一体化技术上,我们攻克了全场景跨尺度测量、大范围自律跟踪定位、高精度自适应加工三大机器人加工的核心技术,实现了大型复杂构件全域高品质制造。以前机床的加工精度依靠机床的钢性、导轨、主轴来保证,未来通过人工智能、大数据、感知,也能够实现一定的精度。
另外,我们也提出了数据驱动的信息物理系统动机理建模方法——IHYDE,阐明了物理流和信息流耦合下的多系统动力学机理和切换逻辑,实现动态数据的解耦,可为智能制造各类场景的建模仿真提供普适性理论支撑。
针对现有智能诊断模型兼容性泛化性不足的问题,提出可用于异构传感信号的通用端到端深度神经网络框架,解释了由于时序依赖性造成的样本划分精度变化问题,研发了制造系统通用AI诊断框架,为制造系统运行的高效性和可靠性提供了重要理论与技术支撑,如图21所示。

图21 AI诊断框架
在技术前沿领域,我们发明了一种软体机器人,如图22所示,它不仅具备类生物的灵巧性,而且具有极好的环境适应性,相关工作已在Science Robotics上发表。另外,我们也自主开发了Turboworks软件,它解决了大量的数学问题。但最重要是其自适应的加工能力,该软件在二阶大摆线的加工和发动机制造上发挥着巨大的作用。

图22 软体机器人
在变形控制与自适应加工方面,我们也开发了大量的应用,如大型叶片的变形控制等。在自主软件Turboworks平台上,完成了国内最大规格的钛合金叶片的批量生产,并且变形控制的效果得到了较大的改善。另外,数字孪生技术在现场应用方面也产生很好的应用效果。在机床制造已经装配了数字孪生系统,通过触控系统,实时读取数据,并进行在线的仿真,从而在线规避了人为设置的加工误差。
在大型风电叶片制造上,我们开发的大型风电叶片机器人智能制造系统入选2018年中国智能制造十大进展,该成果目前已经应用到了高铁车身制造上,主要是利用自适应加工技术实现了车身全形面的点云拼接和型面磨抛。目前正在研究吸附式机器人磨抛技术,希望能够为大型客机蒙皮活化提供新的解决方案。
我们在大型复杂曲面机器人加工技术领域有四大技术创新,分别是全域测量、随形顺应、智能工艺和装备集成技术。采用这些技术,今年我们交付中车7条生产线和9套加工测量系统,并全部成功应用于批量生产。同时也非常荣幸获得了2022年中国机械工业联合会的技术发明特等奖,这也标志着我们国家大型曲面加工技术形成了自主核心竞争力。
03未来研究工作思索及其展望
未来的研究主要有三大方向。第一是大数据驱动与机理建模。如何把现实生活中海量数据提取出来,并将其提炼生成可信机制的模型,从而赋能传统行业,这是我们研究者需要解决的。
第二个是手眼脑协同。要做到手眼脑协同就需要将算法变成芯片,这不是简单的算法、算力的提升。虽然可以借鉴清华大学自行车、特斯拉无人驾驶非结构化环境的算法,但这些算法目前尚不能解决工程中的实际问题。所以,能否研发出适合工业场景的手眼脑协同的AI芯片,并真正应用于工业场景,这是机器人化智能制造发展的瓶颈所在。
第三个是机器人化智能制造。未来的机器人化智能制造将会满足随时随地加工的要求,例如,机器人对航天飞行器舱体的加工过程中,需要随时进行无人化操作,还要进行大范围的“精雕细刻”。除了满足随时随地加工的要求外,还需要有“蚂蚁噬骨”一样的集群加工能力。这次“俄乌战争”中无人机的战斗力非常强,未来这种机器人的全自主集群加工,会不会有一定的应用前景?这个问题也值得我们探讨。以前是“铁打的机床,流水的工件”,未来可能是“工件是铁打的,机床是流水的”。复现机床加工能力,模仿人的技能,创造群体智能,这是机器人化智能制造的未来发展趋势。
从最早的零维固定式机械臂、一维移动机械臂,到二维的全向移动机械臂,如今已经有三维的爬壁加工机器人,未来将会产生全域多栖加工机器人。机器人加工将会不断突破尺度、地域、时间三重约束,新一代的机器人将由此产生。
工程最重要的是科学,而数学家、物理学家、化学家、力学家、生命学家,是科学的心脏和大脑。如何把知识变成能力,让能力服务于工程?如何把工程需求变成普遍现象,并归结为科学原理?这是我们今后几十年要仔细思考的问题。
将知识转化为能力,这是我们工程科学和技术科学的学者们要长期坚持并努力的方向。技术来源于科学,应用于工程,如何将我国的高端制造业向高端迈向并走向世界,形成自主可控的核心技术,这是未来我们的奋斗目标。
(本文刊登于2022年《中国自动化学会通讯》第12期)
作者简介

丁汉
中国科学院院士
华中科技大学校学术委员会主任
国家数字化设计与制造创新中心主任
丁汉, 机械电子工程专家,1963年8月出生于安徽省枞阳县。1989获华中科技大学工学博士学位。1993年受德国洪堡基金会资助赴德国斯图加特大学进行客座研究, 1997年获国家杰出青年基金资助, 2001年受聘为上海交通大学长江学者特聘教授, 2005年和2011年两任“973”项目首席科学家。2013年当选为中国科学院院士。
丁汉教授现任华中科技大学校学术委员会主任,国家数字化设计与制造创新中心主任,国家基金委共融机器人重大研究计划指导专家组组长。他长期从事机器人与数字制造理论与技术的研究,将机器人学和制造技术相结合:建立了复杂曲面宽行加工理论,揭示了刀具“空间运动—包络成形—加工误差”间的微分传递规律,提出了高速加工稳定性分析的全离散法,突破了叶轮叶片数字化智能化加工技术瓶颈,研究成果在中国航发、中航工业、中国中车得到重要应用,取得了显著的经济效益。先后获国家自然科学二等奖1项,国家教学成果一等奖1项,国家科技进步二等奖2项、三等奖1项。
联系地址:陕西省西安市咸宁西路28号西安交通大学电信学院综合自动所内 联系电话:029-82664629 029-82668775 陕ICP备08001950号-1
版权所有:陕西自动化学会 Copyright © 2006 - 2015 www.sxpaa.com All Rights Reserved 技术支持:陕西博通网络
